近日,565net必赢客户端沈浩教授团队在在国际权威期刊《IEEE/ASME Transactions on Mechatronics》上发表冶金自动化领域最新研究成果。《IEEE/ASME Transactions on Mechatronics》是由全球最大的非营利性专业技术学会-电气与电子工程师协会和美国机械工程师学会合办的机电一体化领域国际旗舰期刊(中科院大类一区TOP)。我司为论文第一单位,博士生汪煜东为论文第一作者,沈浩教授为论文通讯作者,该项研究得到国家自然科学基金等项目的资助。
在带钢热连轧生产过程中,各机架间带钢的张力稳定是热连轧能够稳定生产的重要生产指标;如果张力产生波动,会影响到板带厚度和板形质量,张力的稳定控制成为品控的关键。精轧机组的前后机架之间安装有活套装置,通过改变活套装置的抬起角度,来稳定轧制过程中前后机架之间的带材张力。传统活套装置的张力PID控制方案是依赖于经验调整参数,这对于不同的钢种变化、复杂的生产条件等实际生产环境适应性差,精细化智能化生产对活套装置的控制器设计提出了新的更高要求。研究团队针对热轧活套系统实际运行情况,详细分析了热轧活套装置的角度-张力模型,利用自适应干扰观测器降低了由外部扰动信号所带来的活塞位移波动的负面影响,进一步提高带钢产品质量。

(所提控制方法的基本框图)
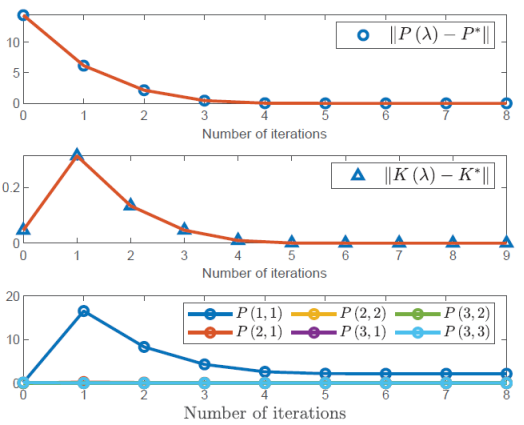
(迭代学习的收敛过程图)

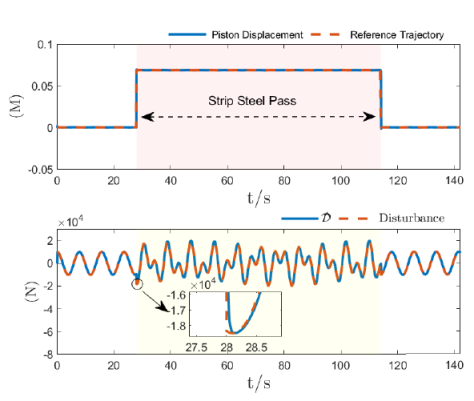
(拟合实际工业现场活套角度变化曲线图)
(所提控制方法的控制效果图)
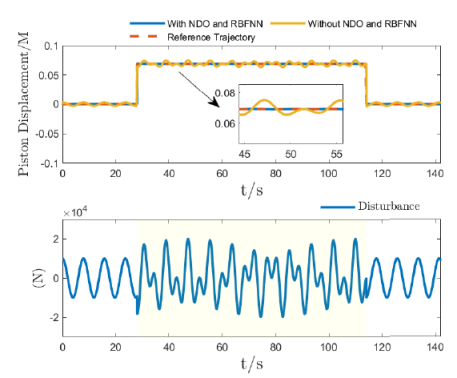
(所提自适应扰动观测器控制效果图)
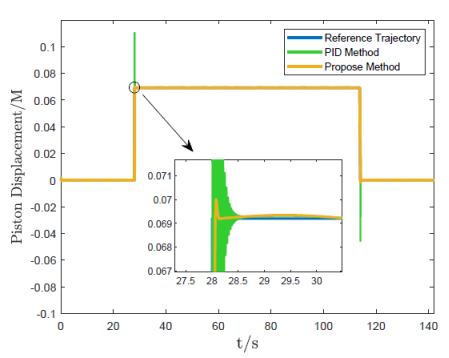
(所提控制方法与传统PID控制方法效果对比图)
研究团队所提出的控制方法还能够充分利用生产过程中系统产生的实时数据,利用强化学习控制算法对数据作进一步分析计算,进而实现了活套控制器增益的优化调节。此项研究能够很好地拓展智能控制方法在冶金制造领域应用,提高产品的生产效率与品控质量,具有潜在的理论研究意义和广阔的市场应用价值。
(撰稿:李清莲;审核:王兵,丁忠利)
文章链接:https://ieeexplore.ieee.org/document/10075062









